今天上午,首个人形机器人半程马拉松在北京亦庄开跑。机器人跑步与人相比有何不同?为什么机器人奔跑如此困难,而人类却能轻松完成?

我们是如何奔跑的?其实奔跑并非天生具备的能力。北京体育大学运动人体科学学院的李翰君老师解释说,在慢跑时,我们主要依靠踝关节驱动,小腿后群和踝关节略微发力,使身体重心前移,从而自然地开始跑步。这一过程中,髋关节和膝关节的作用较小,主要是为了缓冲。

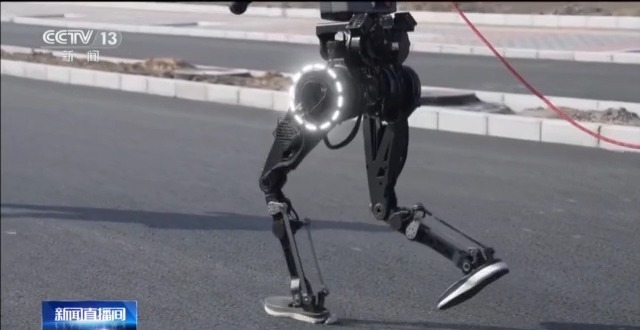
相比之下,机器人在跑步时平衡控制较为困难,每一步都需保持稳定,因此它们通常以平脚落地,主要靠类似人的髋关节来驱动。机器人的膝盖一直保持弯曲状态,以起到缓震作用。机器人跑步需要依靠髋关节带动无感知能力的腿和脚,每次落地时,膝盖和脚都要承受全身压力,这使得关节结构设计和材料选择尤为重要。此外,机器人还需具备快速反应能力,否则难以维持平衡。
机器人没有本能和经验,只能依靠程序和计算。为避免摔倒,机器人必须实时计算未来几百毫秒内的重心、速度和姿态变化,并在极短时间内控制多个关节协同动作。由于缺乏肌肉和弹性肌腱,工程师们通过柔顺控制、抗阻调节和力矩规划等方法,让金属关节学会“软着陆”。这些都需要强大的实时算力支持。